Finaliza el proyecto europeo SARAS, hacia la robótica cognitiva en cirugía
La Dra. Alicia Casals, investigadora del Institut de Recerca Sant Joan de Déu · CREB-UPC, ha colaborado en el proyecto Europeo SARAS (Smart Autonomous Robot Assistant Surgeons), que busca desarrollar una plataforma robótica quirúrgica que permita disminuir el número de cirujanos por operación.
A finales de este año, termina el proyecto europeo SARAS (Smart Autonoums Robot Assistant Surgeons), desarrollado por el consorcio integrado por la Universidad de Verona, Universidad de Modena, Universidad de Ferrara, Ospedale San Raffaele de Milán, Universidad de Dundee, Universidad de Brookes, Medineering Surgical Robotics y ACMIT Austrian Center y la UPC, a través del grupo de robótica y visión del CREB.
Actualmente, muchas operaciones quirúrgicas requieren que varias unidades de personal médico se queden en quirófano para apoyar al cirujano principal. Los asistentes, que suelen ser cirujanos expertos, siempre deben estar presentes para hacerse cargo de procedimientos sencillos que el cirujano principal no puede realizar por estar teleoperando. Por tanto, teniendo en cuenta el coste horario de un cirujano, la práctica actual es muy ineficiente desde el punto de vista económico pero también desde el punto de vista social, provocando largas listas de espera innecesarias.
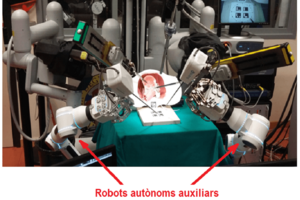
Para hacer frente a esta situación, nació en 2018 el proyecto SARAS, cuyo objetivo era combatir esta ineficiencia mediante el desarrollo de un sistema de control de unos robots auxiliares, dotados de autonomía, que permitieran asistir al cirujano en cirugía robótica por teleoperación. De esta forma, los robots podían suplir las tareas auxiliares que normalmente realiza un cirujano asistente. Mientras la cirugía la realiza propiamente el cirujano principal, el poder liberar a un cirujano asistente de la tarea rutinaria y poco activa de los brazos auxiliares necesarios durante la cirugía, evitará mal aprovechar la experiencia y las capacidades de estos profesionales.
Conseguir este objetivo implica que los robots auxiliares deben conocer el procedimiento quirúrgico básico y poder interpretar en cada momento en qué fase del proceso se está para poder decidir qué actuación de asistencia es necesaria frente a la actuación del cirujano principal. Por ejemplo, estas ayudas pueden ser del tipo apartar un órgano o aguantar una aguja de sutura.
Colaboración del IRSJD·CREB-UPC en el proyecto SARAS
Durante estos cuatro años, la labor del equipo liderado por la Dra. Alicia Casals, Tecnologías médicas: Robótica y Visión, del Institut de Recerca Sant Joan de Déu, ha sido verificar la efectividad alcanzada en un campo quirúrgico sintético, efectuando una prostatectomía radical o extracción de la próstata. El trabajo ha comportado modelizar el procedimiento, establecer las reglas de actuación y realizar la tarea de integrarlo en la plataforma #DaVinci Research Kit, una plataforma de robot quirúrgico teleoperado orientado a la investigación en técnicas de asistencia robótica en cirugía.
Los resultados han sido muy positivos aunque todavía queda un gran impulso para generalizar esta práctica en otras cirugías y dar el salto al mercado, futuros objetivos del consorcio financiado por el programa Horizon 2020 Research and Innovation.
Fuente de información
El CREB en el projecte SARAS, cap a la robòtica cognitiva en cirurgia. CREB-UPC.
El proyecto SARAS busca desarrollar una plataforma robótica quirúrgica que permita disminuir el número de cirujanos por operación.
